-
微信二维码

-
热线电话
×电话
张经理
17203711177
- 返回顶部
张经理
17203711177
|
|
国家煤监部门重点扶持企业 |
 咨询热线: 咨询热线: |
| 透地D波应急通信产品、矿山安全通信产品、移动宽带应急通信产品 | 17203711177 |


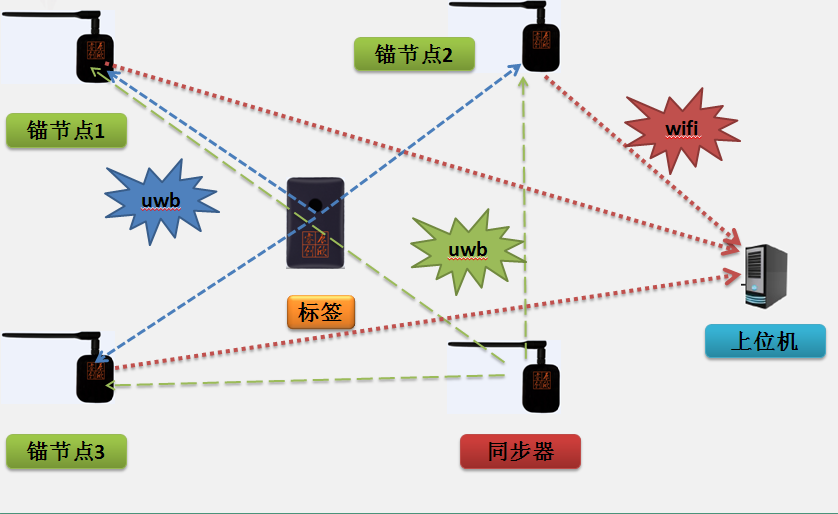
人员定位方案的基础原理是通过测量无线信号的物理特性,结合几何或统计方法,计算出人员所携带标签在空间中的位置。不同的技术采用不同的基础原理,决定了系统的定位精度、稳定性、成本和适用场景。以下是几种核心的人员定位基础原理:
1. 到达时间(Time of Arrival, TOA)
- 原理:测量无线信号从标签发射到被多个已知位置的基站接收所经历的传播时间。
- 计算:距离 = 传播时间 × 光速(约 3×10⁸ m/s)。
- 定位方式:利用三个或以上基站测得的距离,通过三边测量法(Trilateration) 计算出标签的二维或三维坐标。
- 特点:
- 定位精度高(可达厘米级),常用于UWB系统。
- 要求标签与所有基站之间严格时间同步。
- 对时钟精度要求高,系统实现复杂。
2. 到达时间差(Time Difference of Arrival, TDOA)
- 原理:测量同一信号到达两个不同基站的时间差,该时间差对应标签到两基站的距离差,形成一条双曲线。多个时间差可确定多条双曲线,其交点即为位置。
- 定位方式:基于双曲线定位法求解坐标。
- 特点:
- 基站之间需同步,但标签无需精确同步,系统更易部署。
- 抗干扰能力强,适合大范围、高并发场景。
- 广泛应用于UWB、LoRa等系统。
3. 到达角(Angle of Arrival, AOA)
- 原理:利用天线阵列接收信号,通过分析信号到达不同天线的相位差,计算出信号的入射方向(角度)。
- 定位方式:两个或多个基站测得角度后,通过三角测量法(Triangulation) 确定交点位置。
- 特点:
- 可实现方向性定位,适合空间引导。
- 易受多径效应(信号反射)影响,需良好环境设计。
- 常用于蓝牙AOA、Wi-Fi 6/7定位。
4. 接收信号强度指示(RSSI, Received Signal Strength Indicator)
- 原理:无线信号强度随距离增加而衰减。通过测量标签信号在多个基站接收到的信号强度(dBm值),估算其与基站的距离。
- 定位方式:
- 三边法:结合多个基站的RSSI估算距离后定位。
- 指纹定位:预先采集环境中各位置的信号特征(“指纹”),定位时匹配实时信号与数据库进行比对。
- 特点:
- 成本低,蓝牙、Wi-Fi、ZigBee等均支持。
- 易受人体遮挡、墙体、干扰源影响,精度较低(通常1–5米)。
- 指纹定位适应复杂环境,但需前期建模。
5. 蜂窝网络定位
- Cell-ID:根据终端连接的基站ID确定其所在小区范围,精度取决于基站覆盖半径。
- OTDOA:类似TDOA,用于4G/5G网络,通过测量多个基站信号的时间差实现定位。
6. 惯性导航(INS, Inertial Navigation System)
- 原理:利用加速度计和陀螺仪测量运动的加速度和角速度,通过积分推算位移和方向,从而估算当前位置。
- 特点:
- 不依赖外部信号,适合无无线覆盖环境(如隧道、地下)。
- 存在累积误差,需与其他定位技术(如UWB、蓝牙)融合使用。
7. 指纹定位(Fingerprinting)
- 原理:不直接测量距离或角度,而是建立“位置-信号特征”的映射数据库(如Wi-Fi/蓝牙信号强度组合)。
- 流程:
1. 训练阶段:在环境中多个点采集信号特征,建立数据库。
2. 定位阶段:将实时信号与数据库匹配,找出相似的位置。
- 特点:
- 能适应复杂多变的室内环境。
- 需要前期大量数据采集和维护。
- 常用于Wi-Fi、蓝牙定位系统。
常见技术与原理对照表

总结
人员定位方案的基础原理主要包括:
- TOA(测时间→测距离)
- TDOA(测时间差→测距离差)
- AOA(测角度)
- RSSI(测信号强度)
- 指纹定位(模式匹配)
- 惯性导航(传感器积分)
在实际应用中,常采用多技术融合(如UWB+IMU、蓝牙+Wi-Fi)和智能算法(如卡尔曼滤波、机器学习)来提升定位的准确性、稳定性和抗干扰能力。选择哪种原理,需根据具体场景对精度、成本、功耗、部署难度的要求综合权衡。
相关推荐: